製品情報
HQJC
クイックジョーチェンジチャック
自動段取替え
※爪交換精度テスト動画をページ下部からご覧いただけます!
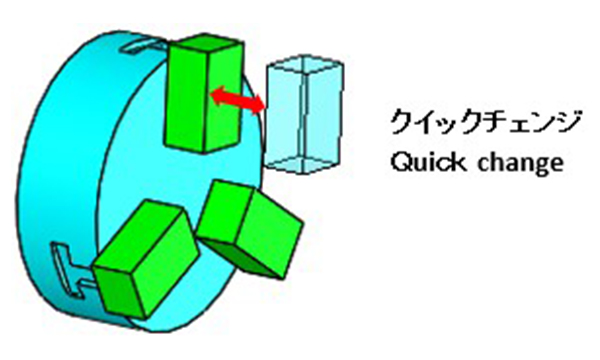
QJC、ROBO-QJCを進化させた自社独自の爪交換システムです
MMKオリジナルダブルスライドは剛性・耐久性に優れます
セレーションを合わせる必要が無く短時間で爪交換が可能です
爪交換繰り返し精度≦10μm
トップジョー交換方式なので切粉の侵入を防ぎます
HQJC爪はボルト穴が無くR成形加工が容易で、
エッジが起たないためワークに傷がつきにくく仕上げ加工精度が上がります
ロボットハンドで爪自動交換、マニュアル交換両方可能です
スマートテラスAIOと併用すれば段取替を含む自動運転が可能です
仕様
| 単位 | HQJCA5-6-35B-02 | HQJCA6-8-46-01 | HQJCA8-10-66-02 | HQJCA8-12-67-01 | HQJCA11-15-103-01 | HQJCA15-18-165B-01 | |
|---|---|---|---|---|---|---|---|
| チャック径の呼び | (インチ) | 6 | 8 | 10 | 12 | 15 | 18 |
| 許容最高回転数 | min-1 | 4,600 | 4,100 | 3,400 | 2,500 | 1,800 | 1,500 |
| 爪ストローク | mm | φ4.7 | φ6.4 | φ8 | φ8 | φ9.5 | φ9.5 |
| シフタストローク | mm | 15 | 20 | 25 | 25 | 30 | 30 |
| ワーク径 最大 | mm | φ151.2 | φ189 | φ228.6 | φ274.5 | φ342.9 | φ411.3 |
| ワーク径 最小 | mm | φ42 | φ52 | φ59.6 | φ65 | φ101 | φ177 |
| 最大把握力 | KN | 46.3 | 82.3 | 98.8 | 114.7 | 147 | 147 |
| シリンダ許容推力 | KN | 17.2 | 28.1 | 32.1 | 42.9 | 51.9 | 51.9 |
| 質量 | kg | 14 | 25 | 43 | 75 | 137 | 223 |
| 適応シリンダ | **** | **** | **** | **** | **** | **** |
取付機械の主軸端形状により、ショートテーパータイプ(JIS B 6109)とストレート嵌め合いタイプをご選択可能です。
ドロースクリュー(F)は、上表のサイズ以外もご選択可能です。詳細は弊社へご相談下さい。
・HQJCチャックは、被加工物や爪成形リングを把握する反力を利用し爪固定を行います。
・把握反力未発生の空掴み状態では、爪固定は完全ではありません。
・100(r.p.m.)以上で回転させると、遠心力で爪が飛散する恐れがあり危険です。
・空掴み状態では、100(r.p.m.)以上で回転させないで下さい。
・また、状況により取付機械にインターロック等を設けて下さい。
ドロースクリュー(F)は、上表のサイズ以外もご選択可能です。詳細は弊社へご相談下さい。
・HQJCチャックは、被加工物や爪成形リングを把握する反力を利用し爪固定を行います。
・把握反力未発生の空掴み状態では、爪固定は完全ではありません。
・100(r.p.m.)以上で回転させると、遠心力で爪が飛散する恐れがあり危険です。
・空掴み状態では、100(r.p.m.)以上で回転させないで下さい。
・また、状況により取付機械にインターロック等を設けて下さい。
資料ダウンロード
